
一种基于预滤波器的矢量跟踪算法(通讯)
一种基于预滤波器的矢量跟踪算法(通讯)
丁翠玲, 陈 帅, 刘亚玲
(南京理工大学自动化学院,南京210094)
摘要:矢量跟踪是研究深组合的关键技术之一。传统的接收机跟踪环路采用标量跟踪模式,该模式在高动态环境下易产生信号失锁,且在弱信号环境下易受电磁干扰;而集中式深组合虽使用了矢量跟踪算法,但由于模型中观测量与状态量呈高度非线性关系,所以难以付诸于工程实践。针对上述情况,设计了一种适用于级联式深组合的矢量跟踪算法,该算法通过分析各跟踪误差与鉴别器输出之间的关系,搭建了预滤波器动态模型。仿真结果表明:高动态环境下,相较于标量跟踪算法,基于预滤波器的矢量跟踪算法具有更好的码相位和载波频率跟踪性能。
关键词:矢量跟踪;信号跟踪;级联式深组合;预滤波器;GNSS; SINS
中图分类号:V249.3 文章编号:1671 - 637X( 2016) 05 - 0042 - 03
0 引言
全球导航卫星系统( GNSS)经过多年的发展,目前在海陆空各方面已经得到了非常广泛的应用。GNSS能够全天候提供三维位置、速度及时间信息,但是弱信号环境下易受电磁干扰,高动态环境下更可能出现丢星失锁的情况。随着卫星导航的不断发展,为应对更为复杂的环境,需要进一步提高卫星导航接收机的性能。信号跟踪算法作为其中的关键技术,决定了接收机的性能,其本质是对载波频率偏移和C/A码延迟进行连续的估计。
传统的卫星接收机采用标量跟踪算法对卫星信号进行跟踪。标量跟踪的优点在于各卫星独立进行信号的跟踪和导航解算,通道之间没有信息交流,每个通道都可以当作一个独立的非线性负反馈系统。但实际上,各卫星信号之间共享了接收机的位置和速度信息,由此可以通过一个卡尔曼滤波器将所有卫星通道的跟踪与导航解算联系在一起,根据各通道输出的跟踪结果直接进行定位,然后再利用同一个定位结果反馈控制各通道的数字控制振荡器( NCO),实现多通道的联合跟踪。这种方法不仅可以提高环路的高动态容忍力,而且可以降低噪声带宽,维持较好的跟踪性能。
为了提高接收机在高动态环境下的跟踪性能,本文设计了一种基于预滤波器的矢量跟踪算法。仿真结果表明:相较于传统的标量跟踪算法,矢量跟踪算法具有更好的跟踪能力和稳定性。
1 矢量跟踪算法
1.1矢量跟踪技术
矢量延迟锁定环( Vector Delay Lock Loop,VDLL)最早由SPILKER J J于1996年提出,他将码环的跟踪与导航解算结合起来,提高了弱信号情况下接收机的跟踪能力。作为一种新型算法,近年来,国内外很多机构对矢量跟踪进行了研究。
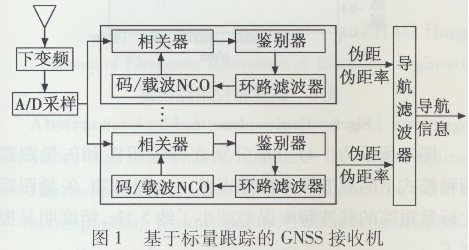
传统的软件接收机采用标量跟踪的算法,各跟踪通道相互独立、并行处理,并将对应的跟踪信息直接送人导航滤波器,通过导航解算估计出接收机的各项信息。图1所示为基于标量跟踪的GNSS接收机。标量跟踪算法采用开环方式,解算出的导航信息对跟踪环路无反馈。
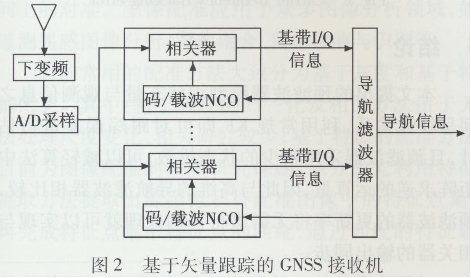
矢量跟踪算法与标量跟踪算法最大区别在于各跟踪通道相互关联。矢量跟踪算法将所有的通道信息耦合在一起,通过一个卡尔曼滤波器实现信号跟踪与导航解算之间的闭环反馈。将各卫星的跟踪误差信息直接作为观测矢量估计导航状态,解算出的导航信息结合卫星星历信息估计跟踪信号的频率和相位信息,并反馈送入本地NCO,实现对多通道卫星信号的联合跟踪。图2所示为基于矢量跟踪的GNSS接收机。
在无外部辅助的情况下,矢量跟踪算法由于充分挖掘了各卫星信号之间的共享信息,被认为是下一代接收机最具发展前景的技术之一。该算法具备以下几个优点:抗干扰能力强、动态跟踪能力好、可瞬时桥接被遮挡的信号、鲁棒性好。
1.2预滤波器模型
GNSS/SINS深组合导航系统根据信息的融合方式可将其分为分布式和集中式两种结构。由于直接将六路基带I/Q信息作为观测量,所以在理论上集中式深组合可以得到最优结果,但该模型中状态量与观测量之间呈高度非线性关系,所以存在容错性差、计算量大两个局限性,难以将其付诸工程实践。
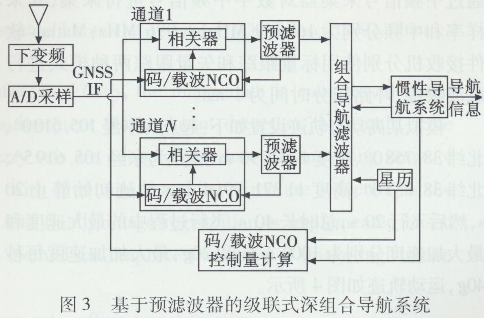
集中式深组合采用单一组合导航滤波器进行处理,计算量较大,为了减轻其处理负担,级联式深组合借助于联邦滤波的思想,将其通过两步实现:第一步,采用基带信号预处理滤波器估计码/载波跟踪误差;第二步,采用组合导航主滤波器估计SINS误差信息。基于预滤波器的级联式深组合模型通过预滤波器来完成码/载波跟踪误差估计。图3所示为基于预
滤波器的级联式深组合导航系统。
预滤波器模型的状态方程为
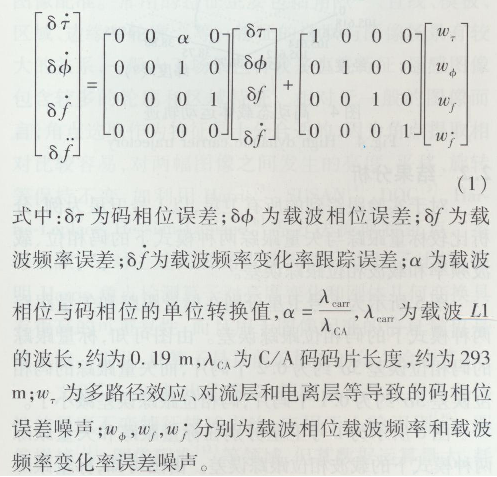
选取归一化的超前滞后包络码鉴别器、二象限反正切载波鉴相器作为预滤波器模型的观测量,观测方程为
2仿真实验
2.1实验条件
采用卫星导航信号模拟器对卫星信号进行模拟;通过中频信号采集器对数字中频信号进行采集,其采样率和中频分别为16. 369 MHz,3.996 MHz;Matlab软件接收机分别使用标量跟踪和矢量跟踪两种模式进行载波跟踪,环路积分时间为1ms。
模拟某高动态轨迹设置如下:起点为东经105. 6100。、北纬38.75800、高度1431.90 m;终点为东经105. 61950、北纬38. 83700、高度11 371. 9911 m。轨迹初始静止200,然后飞行20 s,总时长40 s,飞行过程中的最大速度和最大加速度分别为1000m/ s 和20g,最大加加速度每秒40g,运动轨迹如图4所示。

2.2结果分析
对于实验跟踪到的所有卫星,以1号卫星为例,分析比较标量跟踪与矢量跟踪两种模式下的码相位、载波频率和载波相位跟踪误差。
图5所示为1号卫星分别在标量跟踪和矢量跟踪两种模式下的码相位跟踪误差。由图可知,标量跟踪的码相位误差![]() 约为0.2个码片,而矢量跟踪的码相位误差
约为0.2个码片,而矢量跟踪的码相位误差![]() 约为0.1个码片,码相位跟踪误差减小了。
约为0.1个码片,码相位跟踪误差减小了。
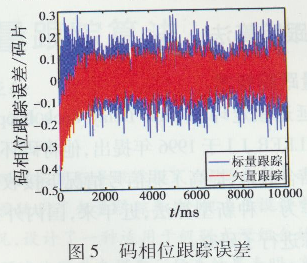
图6所示为1号卫星分别在标量跟踪和矢量跟踪两种模式下的载波相位跟踪误差。由图可知,标量跟踪的载波相位误差![]() 约为0.2 rad,而矢量跟踪的载波相位误差
约为0.2 rad,而矢量跟踪的载波相位误差![]() 约为0.1 rad,载波相位跟踪误差减小了。
约为0.1 rad,载波相位跟踪误差减小了。
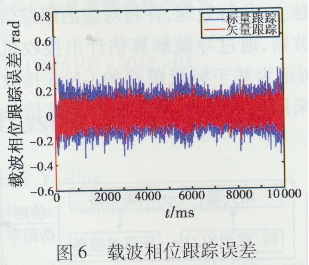
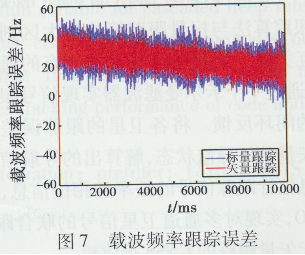
图7所示为1号卫星分别在标量跟踪和矢量跟踪两种模式下的载波频率跟踪误差。由图可知,矢量跟踪比标量跟踪的载波频率误差减小了约5 Hz,精度明显提高了。
3结论
本文提出的预滤波器模型中状态量与观测信息之间呈线性关系,利用常规KF即可对跟踪误差进行估计,且预滤波器采用较少的状态维数,可以减轻算法中矩阵求逆的运算量,因此与高维的导航滤波器相比较,预滤波器的更新率将无需进行特别处理就可以实现与相关器的输出同步。
对跟踪误差的比较仿真结果表明:相对于传统的标量跟踪算法,本文提出的基于预滤波器的矢量跟踪算法能输出更小的跟踪环路误差,提高了接收机的跟踪精度。
本文提出的基于预滤波器的矢量跟踪算法作为实现基于矢量跟踪的级联式深组合导航系统的关键技术,将在未来有广阔的应用前景。